Drone GeoAnalysis
Turning drone footage into actionable intelligence
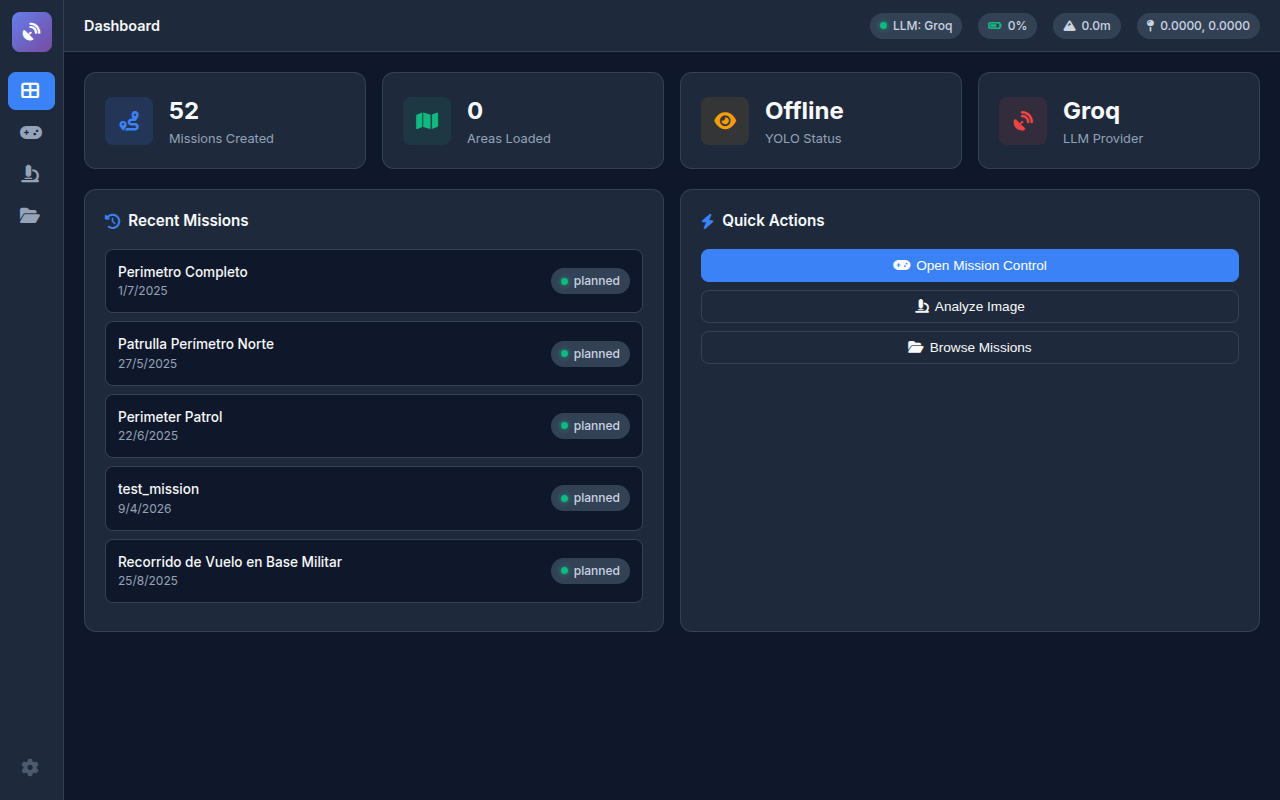
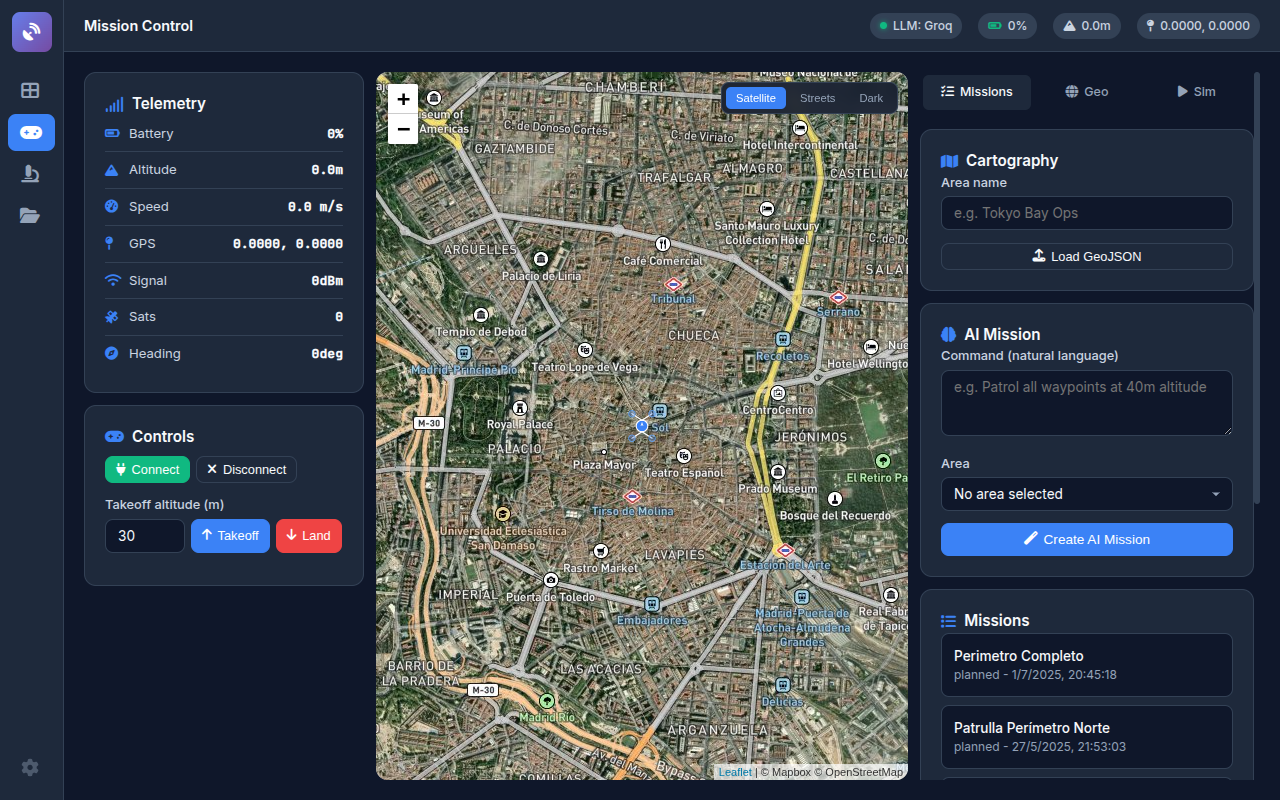
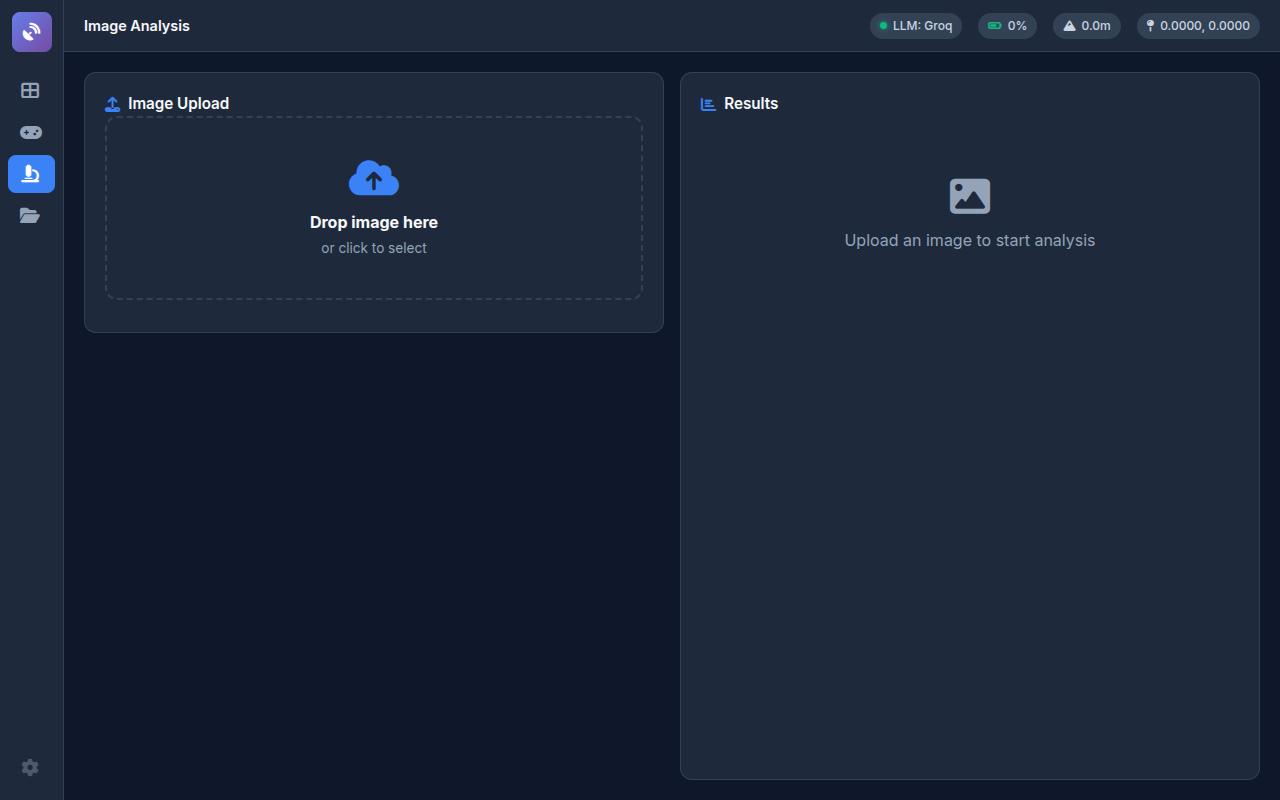
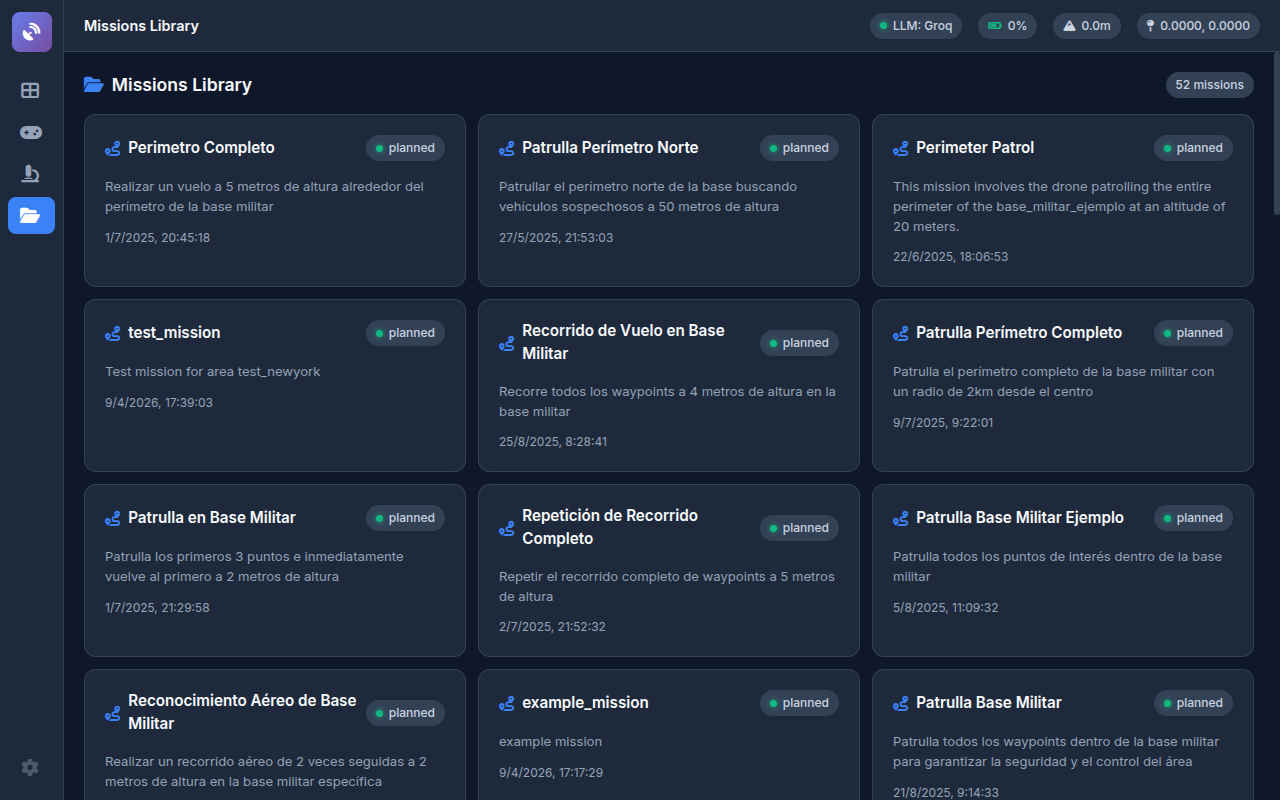
Screenshots
Architecture
Natural Language -> LLM Mission Planner -> GPS Waypoints + Actions -> Drone Execution -> Video Feed -> YOLO Detection -> Geo Correlation -> Change DetectionOverview
The operator describes a mission in natural language. The LLM (Groq/Llama or OpenAI) generates GPS waypoints, altitudes, actions, and safety constraints. The drone executes the mission while streaming video processed by YOLO for real-time object detection and geographic change analysis.
Features: Mission Control with satellite map (Mapbox) and real-time telemetry, YOLOv11 object detection on drone imagery, geographic triangulation and correlation, 52 planned ISR operations, Parrot ANAFI full drone control via Olympe SDK, multi-LLM support (Groq, OpenAI, Docker local), GeoJSON cartography with POIs and security boundaries, LangGraph ReAct agent for querying analysis results.
107 tests with 95.3% success rate. Clean layered architecture: controllers, services, models, hardware abstraction. Factory pattern, Flask blueprints, rate limiting, CORS.
Tech Stack
| Layer | Technology |
|---|---|
| Backend | Flask + Waitress (production WSGI) |
| LLM | Groq (Llama 4 Scout) / OpenAI / Docker Model Runner |
| Object Detection | YOLOv11 (Ultralytics 8.3) + PyTorch 2.5 |
| Drone SDK | Parrot Olympe 7.7.5 (ANAFI) |
| Maps | Leaflet + Mapbox (satellite tiles) |
| Agent | LangGraph ReAct (mission planning + Q&A) |
| Geo | GeoJSON, triangulation, correlation |
| Deploy | Docker Compose (4GB limit, health checks) |